|
ĪĪ
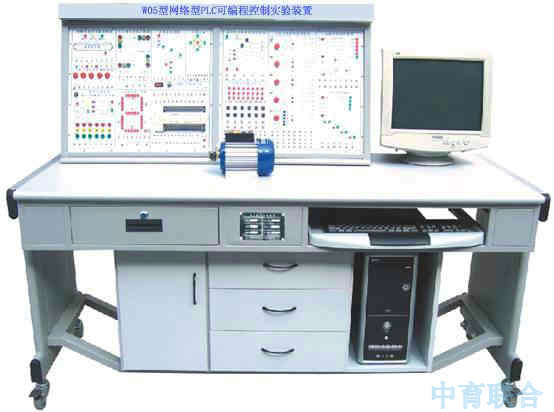
ZY-W05ą═ŠWĮją═PLC┐╔ŠÄ│╠┐žųŲīŹ“×čbų├
ę╗ĪóĖ┼╩÷:▒Ščbų├╩Ū▒ŠŲ¾śIę└ō■Ī░┐╔ŠÄ│╠┐žųŲŲ„╝╝ągĪ▒ĪóĪ░┐╔ŠÄ│╠┐žųŲŲ„╝░Ųõæ¬ė├Ī▒Į╠īWīŹ“×┤¾ŠVĄ─ę¬Ū¾Ż¼ÅVĘ║š„Ū¾Ė„į║ąŻī”įōŅÉĮ╠īWīŹ“×įOéõĄ─ąĶŪ¾║═Į©ūhČ°ķ_░lĄ─īŹ“×įOéõĪŻų„ÖC▀xė├╚š▒Š╚²┴ŌĄ─FX2N-48MRą═┐╔ŠÄ│╠ą“┐žųŲŲ„║══©ą┼─ŻēKŻ©ė├æ¶ę▓┐╔ęį▀xō±Ųõ╦¹ŲĘ┼ŲĄ─┐žųŲŲ„)ĪŻ╦³į┌▒Ż┴¶┴╦Ī░BCSW-01Aą═Ī▒Ą─╦∙ėąā׳c═ŌŻ¼▀ĆŠ▀ėąęįŽ┬§r├„╠ž³cŻ║
1ĪóĮMæB░¶łDŠWĮjĮ╠īWĪĪ▓╔ė├MCGS╣ż┐žĮMæB▄ø╝■Ż¼┤“ķ_▄ø╝■ŠÄ▌ŗŁhŠ│Ż¼╚╬║╬īŹ“×Č╝┐╔ęįŠÄ▌ŗ│÷ą╬Ž¾ų▒ė^ĪóäėĖąÅŖĪóĮ╠īWą¦╣¹║├Ą─ĮMæB░¶łDŻ¼▓ó▀MąąīŹ“×äėæBĖ·█ÖĮ╠īWĪŻ
2ĪóPLCų„ÖCŠWĮjīŹ“×Į╠īW
įōīŹ“×čbų├Š▀ėąā╔ĘN═©ą┼─Ż╩ĮŻ║ó┘Īó1Ż║N═©ą┼Ż¼ę╗┼_ļŖ─XŻ©ų„šŠŻ®┐žųŲ16┼_PLCų„ÖCŻ©Å─šŠŻ®▀Mąą═©ą┼Ż╗ó┌ĪóNŻ║N═©ą┼Ż¼PLCų„ÖC┼cPLCų„ÖCķgīŹ¼F═©ą┼Ż©┐é╣▓8┼_PLCų„ÖCŻ®Ż¼╚╬║╬ę╗┼_PLCų„ÖCŻ©ų„šŠŻ®┼c7┼_PLCų„ÖCŻ©Å─šŠŻ®═©ą┼ĪŻ
3ĪóīŹ“×╩ęŠųė“ŠWīŹ“×Į╠īWŻ¼╝┘╚ń├┐╠ūĪ░PLCīŹ“×čbų├Ī▒Š∙┼õ╔ŽļŖ─XŻ¼┐╔śŗ│╔PLCīŹ“×╩ęŠųė“ŠWŻ¼▀MąąŠWĮj╗»Į╠īWīŹ“×ĪŻ
4Īóīė┤╬īŹ“×Į╠īW╝░蹊┐╔·īŹ“×ĪĪ│²┴╦ęį╔Ž│ŻęÄ╝░ŠWĮjīŹ“×Į╠īW═ŌŻ¼▀Ć─▄▀Mąą▒Š┐Ų╔·«ģśIįOėŗ╝░蹊┐╔·īŹ“×Į╠īWĪŻ
5ĪóīŹ“×ū└
×ķĶF┘|ļpīėüå╣Ō├▄╝yćŖ╦▄ĮYśŗŻ¼ū└├µ×ķĘ└╗ĪóĘ└╦«Īó─═─źĖ▀├▄Č╚░ÕŻ╗ū¾ėęįOėąā╔éĆ┤¾│ķīŽŻ©Ä¦µiŻ®Ż¼ė├ė┌Ę┼ų├╣żŠ▀╝░┘Y┴ŽŻ¼ļŖ─Xū└┬ō¾wįOėŗŻ¼įņą═├└ė^┤¾ĘĮĪŻ
ārĖ±:18500į¬/┼_Ż©ļŖ─XīWąŻūįéõŻ®
Č■Īó╗∙▒ŠīŹ“×ĒŚ─┐
▒ŠīŹ“×čbų├╠ß╣®ęįŽ┬īŹ“×ĒŚ─┐Ż║
1Ż«┐╔ŠÄ│╠┐žųŲŲ„Ą─╗∙▒ŠųĖ┴ŅŠÄ│╠ŠÜ┴Ģ
2Ż«LEDöĄ┤a’@╩Š┐žųŲ
3Ż«čb┼õ┴„╦«ŠĆĄ──ŻöM┐žųŲ
4Ż«╠ņ╦■ų«╣Ō─ŻöM┐žųŲ
5Ż«▓Į▀MļŖÖC▀\äė┐žųŲŻ©īŹ╬’Ż®
6Ż«ų▒ŠĆ▀\äė┐žųŲŽĄĮyŻ©īŹ╬’Ż®
7Ż«▀\┴ŽąĪ▄ć┐žųŲ─ŻöM
8Ż«╩«ūų┬ĘĮ╗═©¤¶┐žųŲ
9Ż«╬ÕīėļŖ╠▌┐žųŲŽĄĮyĄ──ŻöM
10Ż«╚²ŽÓ╩¾╗\╩Į«É▓ĮļŖäėÖC³cäė┐žųŲ║═ūįµi┐žųŲŻ©īŹ╬’Ż®
11Ż«╚²ŽÓ╩¾╗\╩Į«É▓ĮļŖäėÖC┬ōµiš²Ę┤▐D┐žųŲŻ©īŹ╬’Ż®
12Ż«╚²ŽÓ╩¾╗\╩Į«É▓ĮļŖäėÖCĦčėĢrš²Ę┤▐D┐žųŲŻ©īŹ╬’Ż®
13Ż«╚²ŽÓ╩¾╗\╩Į«É▓ĮļŖäėÖCąŪ/╚²ĮŪŻ©Y/Ī„Ż®ōQĮėŲäė┐žųŲŻ©īŹ╬’Ż®
14Ż«╦«╦■╦«╬╗Ą─┐žųŲ─ŻöM
15Ż«čb┼õ┴„╦«ŠĆĄ──ŻöM┐žųŲ
16Ż«ę║¾w╗ņ║Žčbų├┐žųŲĄ──ŻöM
17Ż«ÖCąĄ╩ųäėū„Ą──ŻöM
18Ż«╦─╣Øé„╦═ĦĄ──ŻöM
19Ż«ūįäė┼õ┴ŽŽĄĮy┐žųŲĄ──ŻöM
20Ż«▄łõōÖC┐žųŲŽĄĮy─ŻöM
21Ż«Ó]╝■ĘųÆ■ŽĄĮy─ŻöM
22Ż«ūįäė╩█žøÖCĄ──ŻöM┐žųŲ
23Ż«╝ė╣żųąą─Ą──ŻöM┐žųŲMCGSĮMæB░¶łDīŹ“×Į╠īW
24Ż«└¹ė├ęčŠÄ▌ŗ║├Ą─ĮMæB░¶łDŻ¼ī”ęį╔Ž╚╬║╬īŹ“×▀MąąäėæBĖ·█ÖīŹ“×Į╠īW
25Ż«ßśī”īŹ“×ĒŚ─┐Ą─Š▀¾wę¬Ū¾Ż¼īW╔·ūįąąŠÄ▌ŗäėæB░¶łDŻ¼▀MąąĮ╠īWīŹ“×
ĪĪ
ĪĪ
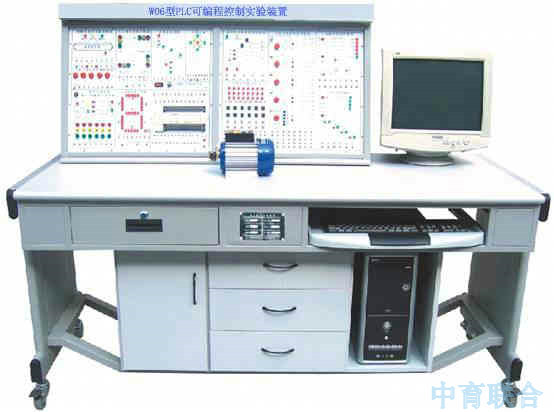
ZY-W06ą═PLC┐╔ŠÄ│╠┐žųŲīŹ“×čbų├Ż©┼P╩ĮŻ®
ę╗ĪóĖ┼╩÷
Ī░ZY-W06ą═PLC┐╔ŠÄ│╠┐žųŲīŹ“×čbų├Ī▒╩ŪīŻ×ķ─┐Ū░╬ęć°Ė„į║ąŻķ_įOĄ─Ī░┐╔ŠÄ│╠┐žųŲŲ„╝╝ągĪ▒ĪóĪ░┐╔ŠÄ│╠┐žųŲŲ„╝░Ųõæ¬ė├Ī▒šn│╠┼õ╠ūįOėŗĄ─ĪŻ┐╔ŠÄ▀ē▌ŗ┐žųŲŲ„Īó═©ą┼ŠÄ│╠Ų„ĪóGX
Developer7.0ŠÄ│╠▄ø╝■ĪóMCGS
V5.5╣ż┐žĮMæB▄ø╝■ĪóĘ┬šµĮ╠īW▄ø╝■Īó─ŻöM┐žųŲīŹ“×░ÕĪóīŹ╬’Ą╚ė┌ę╗¾wŻ¼┐╔ų▒ė^Ąž▀MąąPLCĄ─╗∙▒ŠųĖ┴ŅŠÜ┴ĢĪóČÓéĆPLCæ¬ė├Ą──ŻöMīŹ“×╝░īŹ╬’īŹ“ׯ¼═¼Ģrę▓×ķĖ▀īė┤╬Ą─įOėŗķ_░līŹ“×╠ß╣®┴╝║├Ą─Śl╝■ĪŻ×ķ┴╦ĮY║ŽĮ╠īWę¬Ū¾Ż¼įOėŗ▀^│╠ųąģó┐╝┴╦ć°ā╚ČÓĘNĮ╠▓─Ż¼Å─ųąŠ½▀x│÷ūŅŠ▀Ąõą═ąįĄ─īŹ“×ĒŚ─┐Ż¼┼õ╠ū╚²ŽÓ╩¾╗\«É▓ĮļŖÖCĪŻ
ārĖ±:16500į¬/┼_Ż©ļŖ─XīWąŻūįéõŻ®
Č■Īó╠ž³c
1Īó┐╔┐┐ąįĪóņ`╗ŅąįÅŖ
╠ß╣®īŹ“×╦∙ąĶĄ─+24Vų▒┴„ļŖį┤Ż¼įOėŗĢrīó╚▌ęūōpē─Ą─╣”─▄╝░ī”īW╔·ø]ėą╝╝─▄ę¬Ū¾Ą─ŠĆ┬Ęų▒ĮėĮė║├Ż¼▒ŻūCįOéõĄ─┐╔┐┐ąįĪŻįOėą▀^ē║▒ŻūoļŖ┬ĘŻ¼«öļŖį┤ļŖē║│¼▀^┴╦ų„ÖC╦∙─▄│ą╩▄Ą─ĘČć·Ż¼╝┤ūįäėł¾Š»▓óŪąöÓļŖį┤Ż¼╩╣ų„ÖC▓╗Ģ■ę“│ą╩▄▀^Ė▀Ą─ļŖį┤ļŖē║Č°ī¦ų┬ōpē─ĪŻ▀ĆįOėąļŖ┴„ą═┬®ļŖ▒ŻūoŲ„│õĘų▒ŻūC╚╦╔Ē░▓╚½ĪŻīW╔·┐╔│õĘų└¹ė├├µ░Õ╔ŽĄ─┘Yį┤▀MąąīŹ“ׯ¼ņ`╗ŅĘĮ▒ŃĪŻ
2Īóų▒ė^ąįÅŖ
├µ░Õ▓╝Šų║Ž└ĒĪółDŠĆŪÕ╬·Ęų├„Ż¼░Õ╔ŽėĪėą▒žąĶĄ─╬─ūųšf├„Ż¼į┌▒ŻūCĮėŠĆš²┤_ĪóŠÄųŲ│╠ą“¤oš`Ą─ŪķørŽ┬Ż¼ų╗ę¬╝Üą─Ąž▓┘ū„Ż¼Š═─▄ą╬Ž¾Īóų▒ė^Ąž’@╩Š│╠ą“ł╠ąąĄ─▀^│╠║═ĮY╣¹Ż¼Å─Č°Öz“׊Ä│╠Ą─š²┤_ąįĪŻ
3Īó▓╔ė├Ž╚▀MĪóęūė├Ą─PLC ┼õéõ╚š▒Š╚²┴ŌFX1N-40MRą═┐╔ŠÄ│╠┐žųŲŲ„Ż©ė├æ¶ę▓┐╔▀xō±Ųõ╦¹ŲĘ┼Ų┐žųŲŲ„Ż¼ārĖ±┴ĒāxŻ®ĪŻ
4ĪóĮMæB░¶łDĮ╠īW ▓╔ė├MCGS╣ż┐žĮMæB▄ø╝■Ż¼╦∙ėąīŹ“×Č╝ęčŠÄ▌ŗ│÷ą╬Ž¾ų▒ė^ĪóäėĖąÅŖĪóĮ╠īWą¦╣¹║├Ą─ĮMæB░¶łDŻ¼▀MąąīŹ“×äėæBĖ·█ÖĮ╠īWĪŻ
╚²Īó╝╝ągąį─▄
1Īó▌ö╚ļļŖį┤Ż║╚²ŽÓ╦─ŠĆĪ½380VĪ└10% 50Hz
2Īó╣żū„ŁhŠ│Ż║£žČ╚-10ĪµĪ½+40Īµ ŽÓī”رČ╚<85%(25Īµ) ║Ż░╬Ż╝4000m
3Īóčbų├╚▌┴┐Ż║Ż╝250VA
4Īóųž┴┐Ż║80Kg
5Īó═Ōą╬│▀┤ńŻ║117Ī┴73Ī┴130cm3
Č■Īó╗∙▒ŠīŹ“×ĒŚ─┐
▒ŠīŹ“×čbų├╠ß╣®ęįŽ┬īŹ“×ĒŚ─┐Ż║
1Ż«┐╔ŠÄ│╠┐žųŲŲ„Ą─╗∙▒ŠųĖ┴ŅŠÄ│╠ŠÜ┴Ģ
2Ż«LEDöĄ┤a’@╩Š┐žųŲ
3Ż«čb┼õ┴„╦«ŠĆĄ──ŻöM┐žųŲ
4Ż«╠ņ╦■ų«╣Ō─ŻöM┐žųŲ
5Ż«▓Į▀MļŖÖC▀\äė┐žųŲŻ©īŹ╬’Ż®
6Ż«ų▒ŠĆ▀\äė┐žųŲŽĄĮyŻ©īŹ╬’Ż®
7Ż«▀\┴ŽąĪ▄ć┐žųŲ─ŻöM
8Ż«╩«ūų┬ĘĮ╗═©¤¶┐žųŲ
9Ż«╦─īėļŖ╠▌┐žųŲŽĄĮyĄ──ŻöM
10Ż«╚²ŽÓ╩¾╗\╩Į«É▓ĮļŖäėÖC³cäė┐žųŲ║═ūįµi┐žųŲŻ©īŹ╬’Ż®
11Ż«╚²ŽÓ╩¾╗\╩Į«É▓ĮļŖäėÖC┬ōµiš²Ę┤▐D┐žųŲŻ©īŹ╬’Ż®
12Ż«╚²ŽÓ╩¾╗\╩Į«É▓ĮļŖäėÖCĦčėĢrš²Ę┤▐D┐žųŲŻ©īŹ╬’Ż®
13Ż«╚²ŽÓ╩¾╗\╩Į«É▓ĮļŖäėÖCąŪ/╚²ĮŪŻ©Y/Ī„Ż®ōQĮėŲäė┐žųŲŻ©īŹ╬’Ż®
14Ż«╦«╦■╦«╬╗Ą─┐žųŲ─ŻöM
15Ż«čb┼õ┴„╦«ŠĆĄ──ŻöM┐žųŲ
16Ż«ę║¾w╗ņ║Žčbų├┐žųŲĄ──ŻöM
17Ż«ÖCąĄ╩ųäėū„Ą──ŻöM
18Ż«╦─╣Øé„╦═ĦĄ──ŻöM
19Ż«ūįäė┼õ┴ŽŽĄĮy┐žųŲĄ──ŻöM
20Ż«▄łõōÖC┐žųŲŽĄĮy─ŻöM
21Ż«Ó]╝■ĘųÆ■ŽĄĮy─ŻöM
22Ż«ūįäė╩█žøÖCĄ──ŻöM┐žųŲ
23Ż«╝ė╣żųąą─Ą──ŻöM┐žųŲMCGSĮMæB░¶łDīŹ“×Į╠īW
24Ż«└¹ė├ęčŠÄ▌ŗ║├Ą─ĮMæB░¶łDŻ¼ī”ęį╔Ž╚╬║╬īŹ“×▀MąąäėæBĖ·█ÖīŹ“×Į╠īW
25Ż«ßśī”īŹ“×ĒŚ─┐Ą─Š▀¾wę¬Ū¾Ż¼īW╔·ūįąąŠÄ▌ŗäėæB░¶łDŻ¼▀MąąĮ╠īWīŹ“×
|
 Ė▀ąŻīŻśIīŹ“×┼_
Ė▀ąŻīŻśIīŹ“×┼_
